Built-In Controllers
CarSim、TruckSim 和 BikeSim 是独立的仿真工具,不需要任何其他软件即可运行。 除了基于基本多体物理和车辆组件方程(轮胎、悬架、动力系统、空气动力学)的 3D 车辆模型外,它们还包括开环和闭环控制选项。
开环选项支持来自可用于模型扩展和协同仿真的外部软件的驾驶员/骑手控制,包括具有物理控制器和/或在驾驶模拟器中工作的人的硬件在环设置。 然而,在许多情况下,仿真的目的是预测车辆和人类驾驶员或摩托车骑手的可行行为。 为了支持这些目标,CarSim、TruckSim 和 BikeSim 中的 VS 数学模型具有用于转向(以及 BikeSim 中的骑手倾斜)和速度的内置闭环控制器。
内置驱动程序和骑手控制
VS 数学模型控制器使车辆以适当的速度跟随目标路径。 它们支持多达 500 个目标 VS 路径,并且可以根据需要在它们之间切换。 它们还可以从开环控制切换到闭环控制,以模拟涉及驾驶员控制的各种场景。
路径跟踪(CarSim 和 TruckSim)
CarSim 和 TruckSim 中的闭环转向控制器引导车辆按照规定的路径行驶。 有多种操作模式可供选择:按角度转向、按扭矩转向、使用单个预览点进行转向或使用最佳控制方法进行转向。 控制器在向前或向后行驶时工作。 此外,还包括一个拖车后备控制器,用于在使用单个拖车进行后备时跟随目标点。
路径跟踪(BikeSim)
BikeSim 路径跟随器使用预览点并确定使该点遵循指定路径所需的目标倾斜角。 闭环转向控制器用于获得目标倾斜。
速度控制
VS Math 模型包括一个速度控制器,可以使用动力系统和制动器来满足特定要求。 基本模式有:
- 开环油门、制动和档位选择。 开环油门和制动可以添加到来自速度控制器的闭环命令中,以模拟驾驶员/骑手的干预(人工控制由闭环控制器模拟)。
- 具有多种模式的闭环控制,用于跟随目标速度或目标加速度。 目标速度/加速度可以是恒定的,也可以是根据时间和/或沿指定路径的站点改变目标的可配置函数。
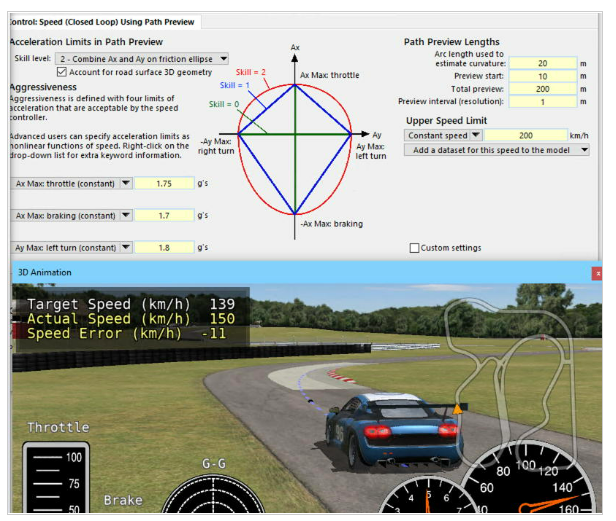
- 使用路径预览的闭环控制,如下所述。
使用路径预览模式,控制器根据几个设置结合环境确定目标速度:
- 预览时间
- 攻击性和技能水平
- 速度限制指定为常数或沿路径的车站功能
- 左、右、前、后的加速度限制,指定为沿路径的站点的常数或函数
- 目标路径的水平曲率(使用目标速度转换为横向加速度)
- 路径的横向坡度(坡度),用于调整可接受的横向加速度
- 垂直曲率,用于调整可接受的纵向加速度
最初引入路径预览模式是为了在模拟可能限制横向加速度的赛道或蜿蜒道路上轻松生成目标速度和加速度。 它还用于许多 ADAS 场景,其中车辆必须准备在特定点(停车标志或灯光)停车。 设置相当简单,即指定一个恒定的目标速度,直到停止点,当它下降到零时。 控制器使用停止要求来自动导出受加速度限制的目标速度。
内置车辆控制器
硬件控制器的详细模型是通过将 VS 数学模型链接到具有模型扩展或硬件的外部软件来处理的。 在只需要基本行为的情况下,可以激活 VS 数学模型中内置的控制器。
防抱死制动系统 (ABS)
CarSim 和 TruckSim 支持 VS 命令 INSTALL_ABS_CONTROLLER 安装一些参数,这些参数激活并指定内置 ABS 控制器的性能,该控制器释放制动压力以避免锁定。 可以从制动系统 GUI 屏幕设置参数值。
电子稳定控制 (ESC)
CarSim 和 TruckSim 支持 VS 命令 INSTALL_ESC 安装一些参数,这些参数激活并指定内置 ESC 的性能,调节单个车轮的制动器以保持稳定性并减轻翻车的威胁。 参数值可以在 GUI 中使用专用库 Control:Electronic Stability 进行设置。
换档
带有变速器的车辆的换档通常由升档和降档换档时间表触发。 这些始终用于具有通过液压变矩器传递扭矩的离散齿轮的自动变速器。 它们还用于模拟驾驶员在手动变速器车辆中的换档。
离合器控制
配备机械离合器的车辆将三个控制装置同步以换档:
1.换档由新的档位请求触发。
2.换档时离合器分离,输入/输出轴分离,换档完成后重新接合。
3.换档时油门下降以避免加速,然后在没有换档影响的情况下恢复到要求的值。
换档控制器可以模拟先进的内置车辆控制器或模拟人类驾驶员。 专用库控制支持换档选项:离合器换档时间线。